
彩色图像处理技术
KURABO的优势在于其用于区分色差的图像处理系统以及不依赖于驱动程序的数据处理技术。
KURABO利用与机械系统和人眼的颜色识别结果相匹配的图像处理技术。KURABO开发了用于平滑处理大容量图像的高级数据处理系统,并通过各种检查设备和打印系统为社会做出了贡献。
久保保的独特技术:极坐标提取法
KURABO独特的颜色提取方法,极坐标提取方法,具有很强的抵抗光量变化的能力。
当识别物体颜色时,人眼会对环境亮度的变化做出响应。因此,人类可以确定颜色而不受周围光线的影响。此功能与感知颜色坐标系密切相关。颜色可以通过各种物理颜色坐标系(RGB值,XYZ三刺激值等)和感知颜色坐标系(色相,亮度,饱和度等)表示。感知色坐标系统具有四个参数:1)明亮–深色(亮度),2)鲜艳–暗淡(饱和度),3)色调(色相),以及4)深色–浅色。
其中,KURABO有效地利用了不受光量影响的两个参数(色调(色相)和暗光(改变光量的通用参数)),创建了独特的极坐标提取方法进行颜色提取。
■极坐标提取方法(方案)
■极坐标提取图像(示例)
有关使用极坐标提取方法的外观检查系统的详细信息
KURABO的数据处理技术可轻松处理大容量图像。
要打印图像,必须使用RIP(光栅图像处理器)系统将命令描述的打印数据转换为点数据。在某些情况下,打印机驱动程序的限制会禁用打印。但是,KURABO的Aupier副本可以打印普通打印机驱动程序禁用的大幅面图像,因为它无需使用打印机驱动程序即可直接操作打印机。有关大幅面扫描仪的详细信息
提示颜色提取(图像处理)和大幅面图像处理
提示1。
什么是颜色提取?
工厂自动化(FA)中使用的常规图像处理流程大致可分为:
传感阶段,在其中捕获图像;
预处理阶段,提取特征量;和
后处理阶段,其中测量以确定结果。
在预处理阶段,最好输出最少的信息量,以方便在后处理阶段进行测量,与接受和拒绝相关的决策。
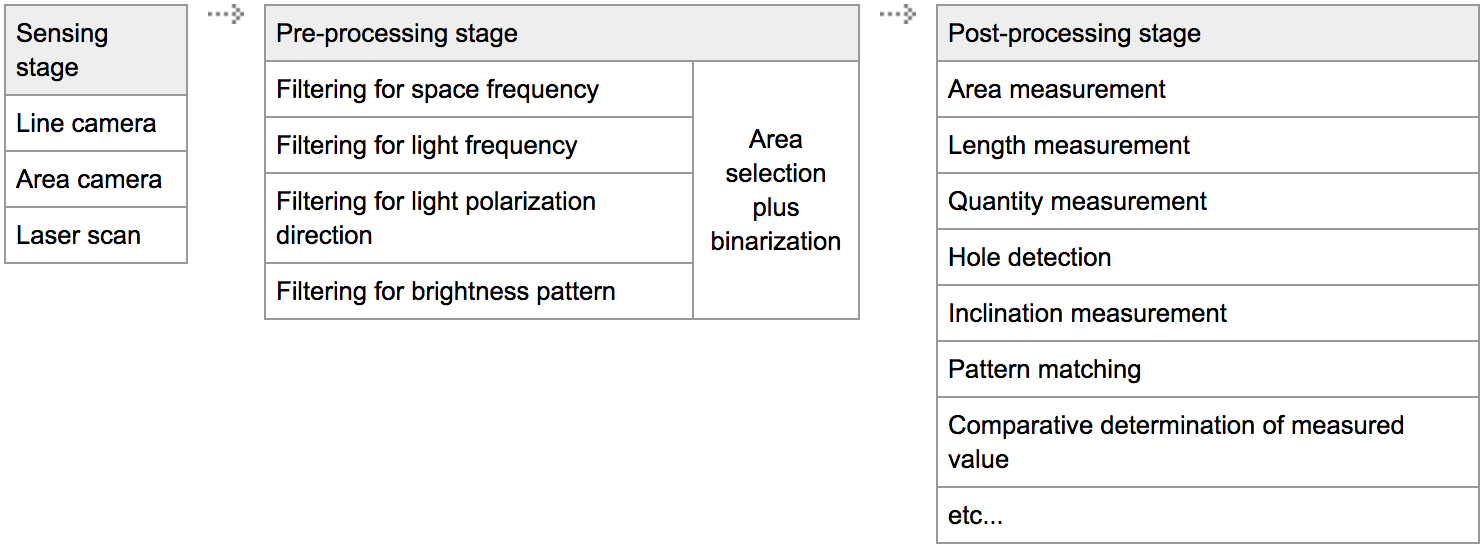
图1:一般图像处理流程
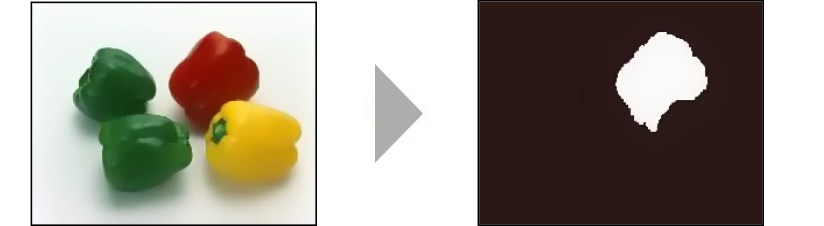
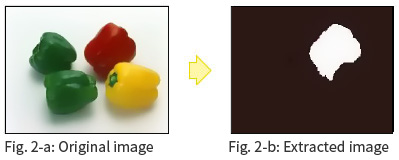
颜色提取是用于彩色图像处理的预处理技术之一。在该过程中,将特定颜色与从彩色相机获得的彩色图像(原始图像)的其他颜色分开。如图2-a所示,例如,当从用彩色相机成像的3色青椒的原始图像中提取黄色区域时,如图2所示获得所得图像(提取图像)。 -b。
结果,原始图像的信息内容为256色调(8位)x 3色(RGB)x像素数,而提取的图像的信息内容为2色调(1位单色)x图像数。等于上述信息内容的24分之一,这减轻了后处理阶段的负担。
但是,当使用实际的FA使用量进行检查时,会存在许多会干扰结果的因素,包括线条的波动,照明的不均匀性以及物体本身的表面不规则性。如果预处理方法不合适,这些元素将导致检查结果不稳定。因此,用于图像处理的预处理方法至关重要。
提示2。
通用颜色提取方法
RGB方式
当用于FA的彩色图像处理系统开始商业化时,RGB方法被广泛采用。使用RGB方法,为每个RGB信号设置一个范围,并提取落入该范围的颜色(参见图3)。对于此方法,简单地将用于单色的相同处理应用于R(红色),G(绿色)和B(蓝色)的图像。因此,硬件可以非常简单地配置,但是与单色图像处理一样,它直接受到照明亮度等变化的影响。
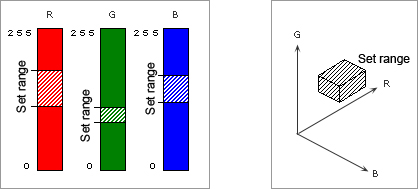
图3:RGB方法
图像色差信号法
随后,图像色差信号方法问世。在该方法中,为图像色差信号指定了颜色范围。更具体地,基于图像信号的矢量范围,在等式1中为亮度信号Y,颜色信号RY和BY值设置上限和下限,然后提取落入设置范围内的颜色(参见图1)。 4)
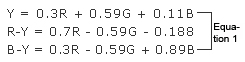
该方法允许为与亮度Y无关的颜色分量指定阈值,亮度Y是光量分量。与上述RGB方法相比,它具有受光量变化影响较小的优点。
人们感知到的色差与该色空间表示的距离(即色差)之间的关系缺乏线性。因此,人类确定为明显不同的颜色可能会被处理为无法识别。
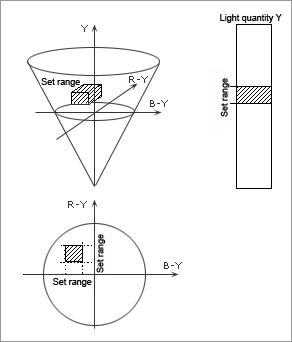
图4:视频色差信号方法
提示3。
极坐标提取方法
当人们确定物体的颜色时(假设在正常照明下具有一般的颜色识别能力,而不是复杂的颜色测量),即使环境亮度发生变化,他们也可以充分识别它们。例如,无论亮度如何,红色都被识别为红色,这也适用于较浅的颜色。这意味着人类具有与光量成分不同的评估参数,并且很容易确定它们。
颜色坐标系(也称为感知颜色坐标系)与这些功能密切相关。可以通过使用使用RGB值,XYZ三刺激值等的物理颜色坐标系(基于波长分布或吸光度)来表示颜色,也可以通过使用其中色相,亮度,饱和度,等。感知颜色坐标系具有四个参数:明亮与黑暗(亮度),阴影(色调),鲜艳与柔和(饱和度)以及浓淡。
在这四个参数中,哪个参数不受光量变化的影响?鲜艳度与柔和度(饱和度)受光量变化的影响,因为随着颜色变亮,它们看起来会更加鲜艳。明亮与黑暗(亮度)本身就是亮度,自然会受到光量变化的影响。不受光量影响的参数是阴影(色调)和粗细与细细。通过有效利用这两个参数(用于改变光量的通用参数),我们已经开发出了我们最初的颜色提取方法,称为极坐标提取方法。